专家观点 | 范炬:车路云一体化—构建智能网联汽车发展新篇章

1.车路云一体化整体进展
当前,基于车路云一体化发展智能网联汽车已成为我国行业共识。车路云一体化的概念,是通过新一代通信技术将人、车、路、云融为一体,基于协同感知、决策与控制实现智能网联汽车交通系统安全、节能、舒适、高效运行的信息物理系统。其中“新一代通信技术”,主要包括4G、5G和C-V2X直连通信,未来随着通信技术的演进,还将逐步引入RedCap、6G以及星地融合等技术;“人、车、路、云”则是主要的交通参与者;采用“协同感知、决策与控制”的方式;最终实现“安全、节能、舒适、高效”的效果。
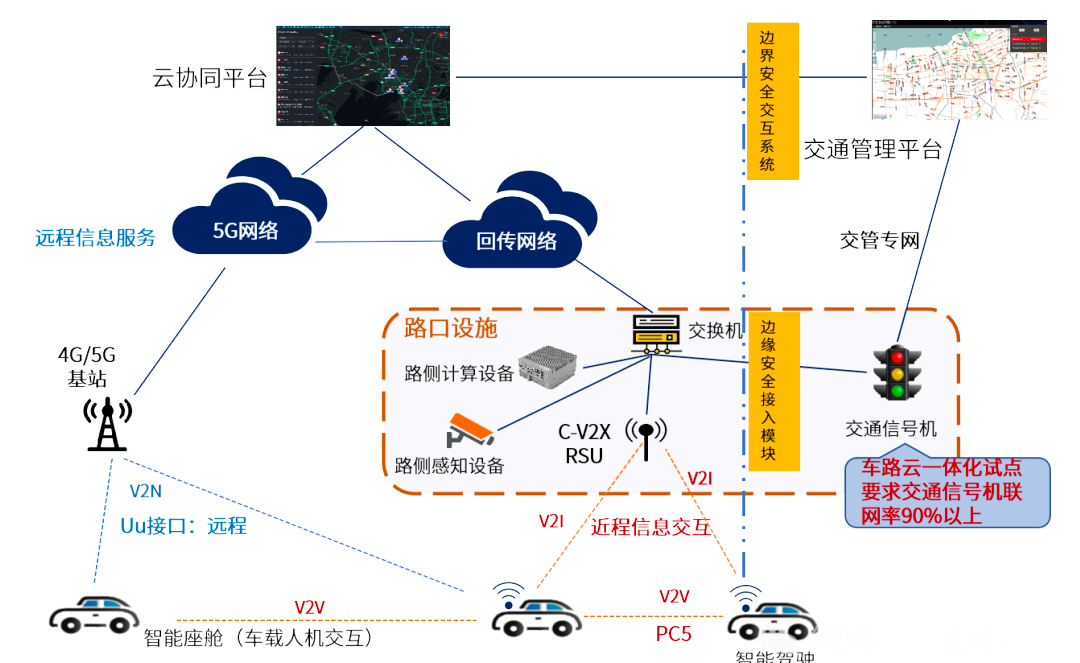
从网络拓扑结构来看,第一层为车辆。车辆一方面会发送自身的信息,另一方面也会接收来自路侧或云端的信息,并将这些信息提供给驾驶员,或与车辆自身的智能驾驶系统相结合;中间层为路侧设施,它能够提供基于“上帝视角”的全局交通参与者信息,并将其传递给车辆;最上层是云端,它从更宏观的层面收集车侧和路侧的数据,经过提取和处理后反馈给车辆,从而通过“聪明的车+智慧的路+协同的云”,最终实现最优通行效果。
车路云一体化的实现离不开三者之间的高效通信,尤其是C-V2X直连通信技术。C-V2X能够提供车与车、车与路、车与人之间的直接通信,并且在高速移动的场景下,满足智能驾驶对低时延、高可靠通信的需求。因此,C-V2X是车路云一体化的关键技术。C-V2X技术标准由我国主导发起,现已成为全球主流的车联网直连通信技术标准,并在美国、韩国等国家得到广泛应用。
在车联网、车路云一体化和智能网联汽车这三个概念中,车联网是支撑车路云一体化的基础性关键技术,通过车路云一体化的应用落地,最终服务于智能网联汽车,为其赋能。
2024年1月,工业和信息化部联合其他四部门发布了车路云一体化试点城市的政策,其核心内容可概括为“规模服务、联网成片”,即“单城打透”。具体试点内容可归纳为三大部分:首先是提升C-V2X的“两率”,即车端渗透率和路侧覆盖率;其次是统一运营主体和标准,探索新模式、新业态,并落地高价值的应用场景;最后是地图、认证、安全等基础性保障。总体而言,车路云一体化试点内容是一个有机整体,着力解决当前产业发展的关键问题,是推动产业发展的重要契机。
2024年7月,第一批20个试点城市(或联合体)正式发布。一些城市给出了C-V2X前装车辆数量规划,并计划开展前装补贴,如长春、重庆、合肥、杭州等。目前,各试点城市的规划正在逐步落地和推进中。
2.关于其中典型场景及其价值
车路云一体化和车联网的核心价值在于安全。根据美国交通部数据,单车智能技术可以规避60%的交通事故,C-V2X技术能够将这一比例提升至81%。而当单车智能与C-V2X技术结合时,则可以规避96%的交通事故,并且其中36%的事故是单车智能无法单独解决的极限场景,须依赖C-V2X技术。2024年8月,美国发布《网联拯救生命:加快V2X部署的计划》,旨在通过C-V2X技术实现道路零死亡人数的愿景,并对C-V2X全国部署及前装上车制定了详细计划,凸显了C-V2X车联网技术在交通安全中的重要性。
道路交通安全事故主要分为两大类。
第一类是城市交通事故,其中多数发生在路口,主要由“鬼探头”和视野盲区引发。以下方实车测试视频为例,单车智能AEB在面对近距离突然窜出的摩托车或自行车时,往往来不及反应。而C-V2X融合单车智能的C-AEB(网联式自动紧急刹车系统)可以通过提前感知行人或两轮车的存在,在TTC(碰撞时间)到来之前做出决策并停车,从而避免事故的发生。

C-V2X融合单车智能的C-AEB 可提前感知行人或两轮车
第二类事故场景则发生在高速公路和快速路上,并且其中二次事故相比较一次事故,往往造成的人身及财产损失更严重。以下方2024年5月1日梅大高速事故为例,事故中多数死亡并非直接由塌方引起,而是因为后续车辆未能及时察觉前方事故而发生连续坠落导致。高速公路上的连环撞车事故也类似,往往在第一次碰撞后,后续车辆因无法及时制动而接连发生碰撞。通过单车智能与网联智能的实测对比可以发现,网联智能技术能够通过V2V(车车通信)提前预警,避免二次事故的发生。

2024年5月1日梅大高速事故
以下方视频中实车测试视频为例,未搭载C-V2X设备的传统AEB情况下,在时速50公里时,中间车辆突然切出时,后方普通单车智能车辆来不及刹停,产生与前车的追尾事故,而搭载了C-V2X设备的网联智能车辆,可以通过V2V通信在中间车辆切出之前感知到前方车辆,及早刹车并避免碰撞。这种场景无需路侧设备参与,仅靠车车通信即可有效应对高速公路上的二次事故,包括连环撞车和塌方等情况。
无/有搭载C-V2X设备实车对比测试
以下对C-V2X车车/车路协同几种典型场景进行介绍:
第一类场景是安全类预警功能。主要通过向驾驶员提供预警信息来降低事故发生率。典型的预警功能包括闯红灯预警、交叉口碰撞预警、左转辅助、盲区变道预警、逆向超车预警以及紧急制动预警等。目前已有十几家车企的20多款量产车型前装搭载了C-V2X技术,可以实现安全类预警功能。也可以通过后装C-V2X OBU(车载单元),在广大存量车上普及安全类预警功能。
第二类场景是解决“鬼探头”问题。网联式C-AEB能够提前感知行人或车辆的突然出现,从而规避单车AEB无法解决的行人/两轮车快速窜出的“鬼探头”事故。
第三类场景是C-ACC(网联式自适应巡航控制系统),传统ACC在城市道路上表现不佳,尤其在通过路口时,有时需要人工干预停车和起步。而网联式ACC可以直接获取红绿灯信息,在红灯或者绿灯时间不足时自动减速停车,在绿灯时自动起步,从而实现全域无人干预的流畅通行,显著提升驾驶舒适性。
第四类场景是车车通信,能够有效解决高速公路或快速路上的二次事故。例如,在梅大高速事故中,如果C-V2X技术普及,第一辆车坠落后会自动触发V2V预警信息,相当于立即在方圆数百米以内放置了虚拟的“数字三角牌”,凡是行驶到此范围内的搭载C-V2X功能的车辆,都可以“看”到“数字三角牌”,从而及早刹车,避免事故,拯救生命。
第五类场景是通过C-V2X技术提升单车智能驾驶水平。尽管单车智能技术已经非常强大,但仍存在一定局限性,例如无法实现超视距感知、受天气环境影响(如大雾、隧道黑白洞效应)、无上帝视角的全局信息、无法相互协作等。例如,一些自动驾驶车辆可能会停在一长串静止车辆后方,却不知道这些车辆是占道停车。此外,单车智能无法判断其他车辆的行驶意图,尤其是在面对不规范驾驶行为时。网联智能驾驶技术能够弥补这些不足,相当于在单车智能“用眼睛看”的基础上,增加了“用嘴巴说”和“用耳朵听”的能力,从而大幅扩展感知范围和能力,最终提升安全性、效率和舒适度。
以下案例可以看到一些单车智能能力受限导致的事故案例。案例一,通过行车记录仪拍摄的画面显示,一辆白色车辆因前方车辆突然切出,导致与前前车发生追尾。案例二,则是一起惨烈的“鬼探头”事故。案例三,是由于前车快速切出、加之前方圆锥桶难以识别而导致碰撞。案例四,是前方大货车与背景山体颜色融为一体,单车智能未能识别,最终引发与大货车追尾事故。以上单车智能难以解决的问题,通过网联式智能驾驶技术均可以轻松应对。

案例一

案例二

案例三

案例四
关于端到端大模型智能驾驶与车路协同的关系,车路协同技术能够扩展感知范围并提供数据增强。通过收集海量其他车辆和路侧信息,车路协同技术可以提升训练数据的规模、质量和类型,从而加速训练,提升智能驾驶水平。同时可降低智能驾驶对高性能AI芯片依赖性,应对算力挑战,降低整体系统成本。
第六类场景是L4级低速无人驾驶的应用,包括机场、矿山和港口等特定场景。以下视频展示了机场网联式无人驾驶项目的实际运行情况。当四个方向的无人运输车同时靠近交叉路口时,系统会通过路侧C-V2X RSU(路侧单元)分配虚拟红绿灯路权,优先放行高优先级车辆或排队较多方向的车辆,其他车辆则按照整体交通策略最优计算结果进行放行,最终实现安全、流畅的快速运行。C-V2X技术赋能L4自动驾驶,在提升安全、生产效率方面可发挥重要作用。
在RoboTaxi应用方面,百度Apollo与中国信科集团中信科智联公司合作,针对复杂场景(如红绿灯检测、盲区遮挡、地图变更、施工占道、违停车辆和路口交互等)的通过率,单车智能可以达到99%~99.9%,而叠加C-V2X技术的网联智能驾驶,可靠性可提升100倍,达到99.99%~99.999%,部分场景通过率甚至可以达到99.9999%。
总结来看,车路云一体化和C-V2X技术对用户、车企、以及社会都具有重大价值。
第一,为用户带来的核心价值是安全。用户无需再担心“鬼探头”、盲区、黑夜或大雾等视线不清的情况,也能规避道路桥梁坍塌或高速公路连环撞车等极端危险场景下的生命危险。此外,网联智能驾驶还显著提升了驾驶舒适性,例如实现城市全域范围下平稳丝滑运行的C-ACC,加速城市NOA(导航辅助驾驶)的落地应用。这些技术的普及应用将为交通安全和驾驶体验带来革命性的提升。
第二,对车企而言,可以通过打造“数字三角牌”和“数字安全带”功能,提升车辆的安全性。例如,在类似梅大高速的事故中,搭载C-V2X技术的车辆能够通过车车通信提前预警,帮助驾驶员从事故中脱险,相比普通车辆具有显著优势。同时,在C-NCAP主动安全测试中,搭载C-V2X技术的车辆能够获得超高分数,从而提升安全性与市场竞争力。此外,C-V2X技术还能够显著提升智能驾驶水平,使其无限接近L3级别,可靠性相对单车智能提升100倍。
第三,对社会而言,车路云一体化技术的普及将显著降低交通事故死亡率。中国每年因交通事故死亡的人数约为6万人左右,这一数字远超自然灾害或生产事故的死亡人数。如果C-V2X技术能够全面普及,理论上可以将交通事故死亡率降低两个数量级。此外,车路云一体化技术还将支撑通信、汽车和交通三个万亿级市场的交叉融合,推动我国智能网联汽车产业的高质量发展。
3.关于产业发展的建议和思考
首先,应大力推动全域智能化基础设施的建设,并建议分场景、分阶段实施。第一步是构建一个基础网络,在城市全部路口安装C-V2X RSU,实现红绿灯信息和交通标牌向车辆推送,从而加速城市NOA的落地。第二步是在重点路段增加感知设备,为智能网联汽车提供更进一步的增值服务。最后则是实现全域数字化和全域感知,全面满足智能交通需求。
其次,建议多措并举大力提升C-V2X车端渗透率。可以借鉴新能源汽车和移动通信产业发展经验,通过前装和后装补贴政策迅速提升C-V2X车端渗透率。一旦渗透率达到拐点,补贴政策可以逐步退出。此外,应尽快落地一些高价值场景,以牵引产业的快速发展。正如移动终端APP应用大力推动了移动互联网产业发展,车路云一体化产业的发展也需要通过高价值场景的落地来带动。为此,由移动通信及车联网国家工程研究中心牵头,32家行业单位编撰了《车路云一体化C-V2X车车、车路协同典型场景及实施参考》(可查看本文底部链接进行下载),选定了14个高价值、可落地场景,并从车侧视角提供了功能性能要求、总体框图、输入输出等参考设计,帮助车企快速完成开发。14个典型场景可以归为五类,包括红绿灯应用类,C-NCAP法规类(前车切出、有遮挡十字路口碰撞),城市或高速公路交通痛点类(鬼探头、圆锥筒、公交道共享、“数字三角牌”),网联智能驾驶(C-AEB、C-ACC),特定场景无人驾驶(车辆编队、港口、矿山等)。通过这些高价值场景的快速落地,将有效推动车路云一体化产业发展。
展望未来,当C-V2X RSU在城市内实现全域覆盖,红绿灯和交通标牌信息能够实时推送,并在重点路段安装感知设备,同时车端渗透率达到15%以上的拐点时,可实现车路云一体化的丰富功能,包括协同预警、协同辅助驾驶和协同自动驾驶等。从不同智能驾驶等级来看,L1级别可以通过协同预警功能在全域范围内为驾驶员提供安全提示,显著降低事故发生率。L2级别则能够实现更安全、高效和舒适的通行,促进辅助驾驶迅速发展,并加速城市NOA的落地。同时可以加速推动工业和信息化部L3准入政策的落地。而L4级别在特定场景下能够实现稳定的商业化无人驾驶应用,显著提升安全性和生产效率,例如RoboTaxi的可靠性提升100倍,达到商用水平。
最后,综合上述内容,车路云一体化是我国智能网联汽车发展的必经之路,目前五部门的试点工作正在有力推进。从价值体现来看,单车智能是基础,而通过C-V2X车联网技术赋能,能够增强感知和丰富数据,显著提升安全性、效率和舒适性,尤其是在解决城市路口“鬼探头”、盲区事故,以及高速公路和快速路上的二次事故方面具有重要作用。因此,对用户、车企、以及社会都具有极大的价值。在发展建议上,应大力提升车端渗透率和路侧覆盖率,并通过快速落地高价值场景牵引产业快速发展。可以预见,车路云一体化和C-V2X技术的应用,将大力推动我国智能网联汽车产业发展,并在全球化竞争中取得决定性胜利。

重庆: 重庆市高新区科学谷数智科创园3幢8-10层
北京: 北京市朝阳区安定路5号院19号城奥大厦13层
邮箱地址: icvmkt@cictci.com
销售电话: 023-65165656(重庆) 010-64286688(北京)
售后电话: 400-666-3620
关注我们的官方媒体:


